
Fitting of Over-the-Ear Headphones
ME 547: designing for human variability
penn state, 2015
For this final project, my teammates and I designed and ran an experiment to determine the important design features for headphone comfort. Based on this data, we then designed a headphone that the 95% of the general US population would find comfortable.
View the final report.
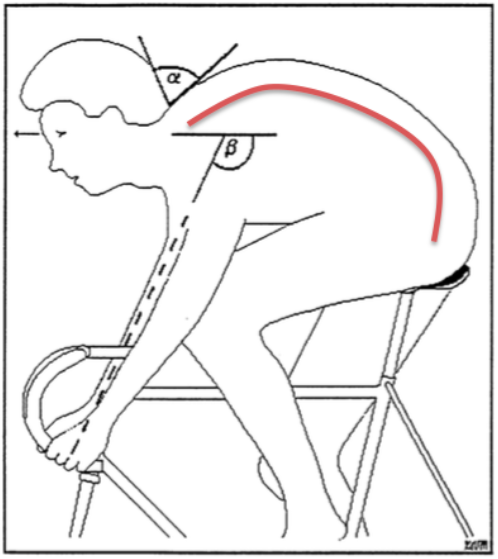
Bicycle Sizing and Fit
ME 547: designing for human variability
penn state, 2015
When given the opportunity to write a research paper about designing for varying human shapes and sizes, I chose bicycle frames. Combining data from both academic sources and bicycle framebuilders and manufacturers, I discussed the different approaches to sizing bicycles, and what it means to have a well-fitting bicycle.
Read the final paper, or look through my summary presentation.

Construction of a Mechanical Analog Multiplier Mechanism
ME 581: simulation of mechanical systems
penn state, 2016
Inspired by a 1953 Navy training film on mechanical fire control computers, I designed and fabricated a mechanical analog multiplier mechanism as my final project.
View the final report and documentation.

Design of a Two-Wheeled Balancing Robot
ME 545: advanced mechatronics
penn state, 2017
For the final class project, my teammates and I designed and built a two-wheeled balancing robot, using an Arduino microcontroller reading data from a inertial measurement unit chip and running a PID control loop.
View the final report.

Maze Solving and Tennis Ball Gathering Robot
ME 545: advanced mechatronics
penn state, 2017
For this project, my teammates and I were tasked with designing an autonomous robot that could traverse a maze, while searching for and collecting tennis balls randomly placed within the maze. We developed a robot that used a webcam to identify the tennis balls and a forklift-inspired mechanism to collect them.
See a gallery of the completed robot.

High-tension cable cutting device
capstone senior design
columbia university, 2010
For my undergraduate senior design project, my teammates and I designed and fabricated a device to safely cut tensioned steel cables, intended for use by firefighters or urban search-and-rescue teams. Our final device featured custom-designed and fabricated cams to clamp onto the cable with a worm gear driven winch to reel in and remove tension from the section of cable to be cut. These mechanisms were housed in a stainless steel chassis, and the entire device was designed around a load of 600 pounds.
Watch a demonstration video of the device.